Urban environments present unique challenges for autonomous vehicles due to their complexity, density, and dynamic nature. Navigating through crowded streets, dealing with unpredictable human behavior, and accurately interpreting traffic signals and signs are just a few of the tasks that autonomous vehicles must master to operate safely in cities. LiDAR (Light Detection and Ranging) plays a critical role in enabling autonomous vehicles to meet these challenges, providing the precise, real-time data necessary for safe navigation. This article explores the importance of LiDAR in urban environments and how it helps autonomous vehicles navigate the complexities of city driving.
Handling Dense Traffic and Crowded Streets
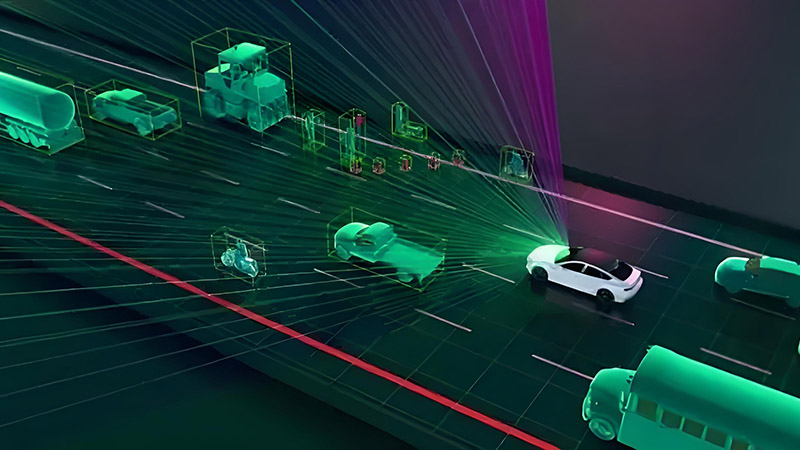
One of the primary challenges in urban environments is the high density of vehicles, pedestrians, and cyclists. Autonomous vehicles must be able to detect and track multiple objects simultaneously to avoid collisions and ensure smooth navigation. LiDAR excels in this area due to its ability to generate detailed 3D maps of the environment, capturing the positions and movements of objects in real-time.
LiDAR’s high resolution allows it to distinguish between closely spaced objects, such as a group of pedestrians standing near a parked car or a cyclist riding alongside a vehicle. This level of detail is crucial for making accurate decisions in dense traffic, such as when to stop, yield, or change lanes. Additionally, LiDAR’s ability to measure distances accurately helps autonomous vehicles maintain safe following distances and avoid sudden stops, contributing to smoother traffic flow.
Navigating Complex Intersections
Urban intersections are among the most complex driving scenarios for autonomous vehicles. They involve multiple lanes of traffic, varying signal patterns, and the presence of pedestrians and cyclists. LiDAR provides the precise spatial information needed to navigate these intersections safely.
For example, at a busy intersection, LiDAR can identify the positions of vehicles in adjacent lanes, detect pedestrians waiting to cross, and monitor the status of traffic signals. This information allows the autonomous vehicle to make informed decisions, such as whether it’s safe to proceed through the intersection or whether it should yield to a pedestrian or another vehicle.
Moreover, LiDAR’s ability to detect and track objects in three dimensions helps the vehicle anticipate the movements of other road users, such as a pedestrian stepping off the curb or a cyclist changing lanes. This predictive capability is essential for preventing accidents and ensuring the safety of all road users in urban settings.
Interpreting Traffic Signals and Signs
In urban environments, autonomous vehicles must be able to accurately interpret traffic signals and signs to comply with traffic laws and navigate safely. While cameras are typically used for this task due to their ability to capture visual information, LiDAR can complement cameras by providing additional spatial data.
For instance, LiDAR can help verify the position and orientation of a traffic signal or sign, ensuring that the autonomous vehicle is interpreting the correct signal in situations where multiple signals or signs are present. LiDAR can also detect the presence of temporary signs, such as those used in construction zones, which may not always be clearly visible to cameras.
By combining data from LiDAR and cameras, autonomous vehicles can achieve a more accurate and reliable interpretation of traffic signals and signs, reducing the risk of errors and enhancing overall safety in urban environments.
Dealing with Unpredictable Human Behavior
Human behavior in urban environments is often unpredictable, with pedestrians and cyclists frequently making sudden or unexpected movements. Autonomous vehicles must be able to respond quickly to these behaviors to avoid accidents.
LiDAR’s real-time object detection and tracking capabilities are crucial for managing these scenarios. For example, if a pedestrian suddenly steps into the street or a cyclist swerves into the vehicle’s path, LiDAR can detect these movements immediately, allowing the vehicle to take evasive action. The ability to react quickly to changes in the environment is essential for ensuring the safety of both the vehicle’s occupants and other road users.
Additionally, LiDAR’s ability to operate effectively in various lighting conditions, including low light and bright sunlight, ensures that the autonomous vehicle can detect and respond to human behavior at any time of day. This reliability is particularly important in urban environments, where lighting conditions can change rapidly.
Improving Navigation and Localization
Accurate navigation and localization are essential for autonomous vehicles to operate safely in urban environments. LiDAR’s ability to create detailed 3D maps of the surroundings helps the vehicle maintain an accurate understanding of its location and navigate complex urban landscapes.
For instance, in areas with tall buildings that can obstruct GPS signals, LiDAR can provide the necessary spatial data to keep the vehicle on track. By comparing real-time LiDAR data with pre-existing maps, the autonomous vehicle can accurately determine its position, even in GPS-challenged environments.
LiDAR’s precise mapping capabilities also enable the vehicle to identify landmarks, road features, and obstacles, improving its ability to follow planned routes and avoid hazards. This enhanced navigation capability is crucial for ensuring the vehicle’s safety and reliability in urban settings.
Conclusion
LiDAR plays a vital role in enabling autonomous vehicles to navigate the complexities of urban environments. Its ability to handle dense traffic, navigate complex intersections, interpret traffic signals and signs, respond to unpredictable human behavior, and improve navigation and localization makes it an indispensable technology for city driving. As urban areas continue to grow and become more congested, the importance of LiDAR in ensuring the safety and efficiency of autonomous vehicles will only increase.



